
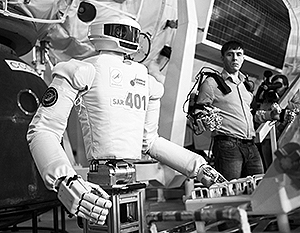
Представлен российский робот-космонавт SAR-401
Российский человекоподобный робот SAR-401 представлен в среду в Звездном городке. Предполагается, что в будущем...
Да какой же это робот? Дистанционный манипулятор просто. Нечто подобное используется в атомной промышленности.

 Нравится
Нравится
 В избранное
В избранное Цитировать
Цитировать
подробнее